小型パソコンを用いて多機能かつメンコいロボットを作ることを目的とする。
搭載予定機能
- 無線LAN
- カメラ(画像解析)
- 自動ブログ作成
- オムニホイール(自作!)
- マスタースレーブ(初期型完成!)
現在開発中の機体
穴あきアルミ板を加工してフレームにした。
移動はステッピングモータで行う。
写真ではマイコンしか乗っていないが、
今後フレームを若干大型化してMINI-ITX規格のマザボを載せるか、ノーパソを載せる。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (myrobot001.jpg)
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (myrobot002.jpg)
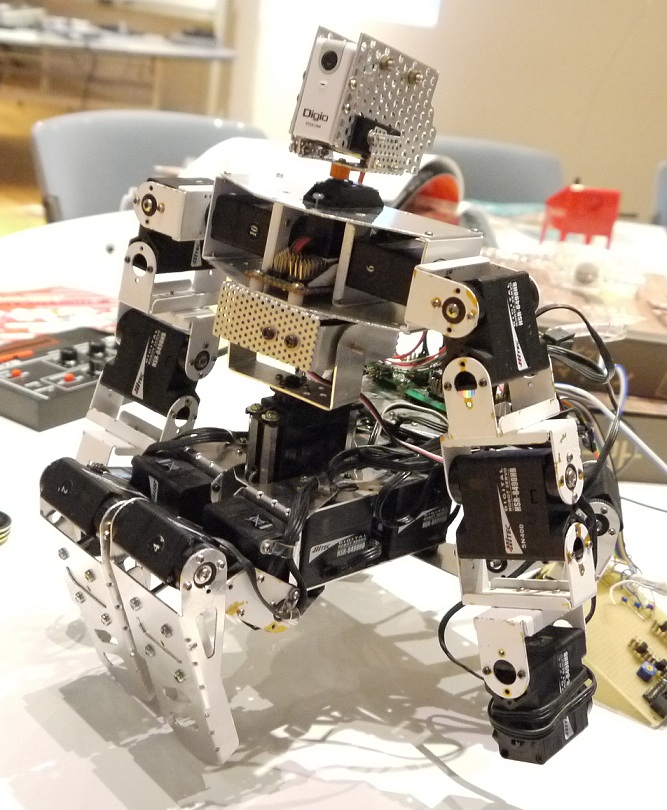
三番目が大型タイプが最新型です。かなり形が変わりましたね。
過去に開発した機体
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (robonova.jpg)
こちらはHitec社のキット。私がサークル創設に当たり、最初に購入したロボットです。
先に紹介したヒューマノイドの上半身およびサーボはこちらから部品を一部借りています。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (line_trace.jpg)
ライントレース用のプロトタイプロボット。もちろん車両型。
大会によっては2輪のほうが多かったりしますが、
早さを求めてレーサーカー型の4輪に。
記録は残せていませんが、記念すべき1台。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (original_tachikoma_side.jpg)
サークル創設時に作ったオリジナル作品。
某ロボット書籍から引用し、H8マイコンで制御しているもの。
単体として活動することはあまりなかったが、
現在は二代目として復活している。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (robodesigner.jpg)
こちらもキット。ロボデザイナー。
サークルの講習用に購入したもの。
多数イベントで子供たちのプログラミング講習にも役立つ。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (tri_robot.jpg)
ロボットトライアスロン大会にて初出場時に製作したライントレースマシン。
これもまた成績は残せなかったが、
サークルとして製作した初のロボットであると同時に、初大会ロボットなので
やはりこれも記念すべき一台です。
マスタースレーブによる操縦
このロボットはコントロールスーツを着用し、
その動きをロボット側でトレースすることによって操作します。

(詳細は後日掲載)
キネクトやAR等、人間の姿勢を読み取るデバイスが溢れつつある現在、
あえて物々しいハードウェアを身にまとうのには理由がある。
私が考えるに、ロボットと人間をつなぐデバイスとは
その情報が双方向であることに意味がある。
インターフェースが人間に与える情報は多くの場合「情報」そのものである。
LEDやLCD、ディスプレイや音声による情報を得て人間はロボットからのフィードバックを得る。
ここで提案したいのは力覚フィードバックによる「人機一体感」の創造である。
力覚フィードバックによるパワーアシスト系の研究は古く、かつ広く行われてきており
現在では珍しいものではなくなっている。
ただし、その研究コンセプトの根幹は「マシンによる人間のサポート」であり、
良くも悪くもマシン側は「スレーブ(奴隷)」として捉えられている。
もちろんのこと、マシンは道具であり人間の役に立つことが前提である。
しかしながら、これまでのマシンに対する位置づけが目標達成にマッチしているかどうかは別の議論となる。
ロボットは人間側が仕組んだアルゴリズムに従うがゆえに、
「人間の言うことを聞く」必要があると考えがちだからである。
先にも述べたが、マシンとは道具である。
では人間が古くから現在に至るまで用いてきた道具は、果たして人間の「思い通りの奴隷」であっただろうか?
キーボードのタイピング、楽器の演奏、箸の取り扱い、いずれも修練を必要とする。
人間の肉体という「デバイス」すらその例外ではないのだ。
それらの修練や操作性の低さを低減するべく生まれてきた機械、ロボットは数多存在するが
果たして「デバイスを扱うための修練」とは「悪」なのであろうか?
この修練はロボットや機械を創造する上で対極にある思想なのであろうか?
この議論の発端の一つとして「面倒なことをマシンにやらせたい」という人間の願望から成る。
加えて「面倒くさがっても問題なく、なおかつマシンに達成可能」なものが対象となる。
例えば、徒競走は自転車やバイクといったデバイスを使えばいくらでも記録の更新が可能になろう。
この場合は「人間の限界に挑む」ことが目的であるので、「面倒くさがると問題」になってしまう。
よってデバイスを使うことが出来ない。
ではF1レースではどうか?
これは車体のスペックと人間のスペックの双方によって成績が得られる。
いかにも「デバイスを扱うための修練を善とみなす」例に見え、実際にそうである。
しかしながら、F1レースをする人間および車体はごくごく一部であり、
人間社会全体をよくしようとする観点から言えば、例外的と捉えられてしまう。
人間が修練を嫌う理由は単純に面倒だからというだけではなく、
修練に見合うだけのリターンが得られないから、ということでもある。
車の教習であればその修練と金額に見合うだけの価値があると思えばこそ、修練に励むわけである。
が、この車でさえも、将来的には自動化したいという流れすらある。
このように考えてくると、なかなか「工学的見地から人間を活かす」というのが難しい用に思えてくる。
搭載予定メインPC
現在搭載予定のモバイルパソコンEeePC「T91-mt」である。
選んだ理由は
1.タッチスクリーン
2.小さい
以上!
搭載するとなれば、小さいマザボを載せることも考えていますが、
バッテリー問題を簡単に解決するにはノーパソを乗っけてしまえばいいわけですね。
使用ステッピングモータ
軸が6.35mmなので、M6のナットを加工した
これによってタミヤのラジコン用タイヤが使えるようになる。
若干ナットの方が小さいので、アルミやプラ板なので隙間を埋めるとよい。
#ref error :ご指定のファイルが見つかりません。ファイル名を確認して、再度指定してください。 (nat.jpg)
本体駆動用のマザーボード
H8/3694とH8/3069を使用
ここからADとステッピングモータの駆動、
そのほかスイッチ等の入出力を行う。
メインの命令はGIGABYTEマザボからシリアル通信にて行う。


ステッピングモータ用のFETドライバ
バイポーラタイプではあるが、1-2励駆動のため
信号入力は片輪につき4本。
回路図は
各種駆動回路に掲載してあります。

ライントレース用センサ
以前秋月で取り扱っていたフォトインタラプタを用いたライントレースセンサ。
NOT回路を間にはさんで、マイコンに8ビットデータを出力する。
一応ここに公開はしていますが、現在は
ARToolkitおよび
OpenCVにて画像解析トレースを行う予定です。

imageプラグインエラー : 画像を取得できませんでした。しばらく時間を置いてから再度お試しください。
総合: - 、今日: - 、昨日: -
最終更新:2011年08月05日 09:10