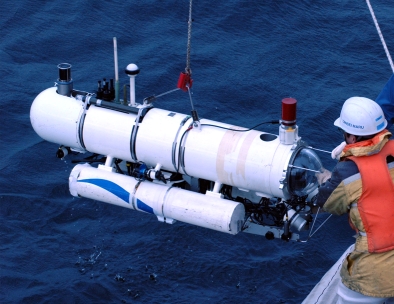
概要
1999年に東京大学生産技術研究所において開発されたホバリング型AUV。高度な自律アルゴリズムの開発を目的としたテストベッドである。6台のスラスタによって5自由度(サージ、スウェイ、ヒーブ、ヨー、ピッチ)の制御が可能。
スペック
| 全長 |
1.9m |
| 空中重量 |
180kg |
| 最大深度 |
100m |
| 稼働時間 |
3時間 |
| 最大速度 |
0.7m/s (サージ) |
| CPU |
Pentium M 1.6 GHz (Main PC) |
|
Pentium 4 2.4 GHz (Vision PC) |
○運動センサ
圧力計、AHRS(Attitude Heading Reference System)、光ファイバジャイロ、ドップラー式流速計
○環境センサ
障害物探知ソーナー×6、プロファイリングソーナー
○観測装置
可視光カメラ×3(前方、直下、斜め下方)、シートレーザー、アーク灯×2、フラッシュ灯×2
○その他
無線LAN、音響通信装置、フラッシュビーコン
関連資料
建造当時の情報です。
自律的に円筒状の構造物を周回する。本実験によって、橋脚などの水中構造物の自律観測の可能性が示された。ピンポイントレーザーとカメラを用いた三角測量によってターゲットとの位置関係を取得、距離と角度を保ったまま周回する。
AUVに搭載した複数のセンサ情報をパーティクルフィルタによって確率的に融合し、あらかじめ与えた環境地図とマッチングすることによりAUV単独での測位を実現した。本ビデオは、こうして得られた位置情報を元に、あらかじめ与えられた観測経路に沿って自律航行する様子である。
岩手県の
釜石湾口防波堤にて、上記アルゴリズムの実証試験が行われた。本ビデオはダイバーによって撮影されたものであるが、このような劣悪な環境においてもロバストな自律航行が可能であることが示された。
6ページに釜石実験に関する記事あり。
トライドッグの測位手法が紹介されている。
最終更新:2006年08月22日 14:18

